Passively-actuated legs for krill robot
3D-printed PLA, laser-cut acrylic, arduino, CAD
May 2022, Wilhelmus Lab, Brown University
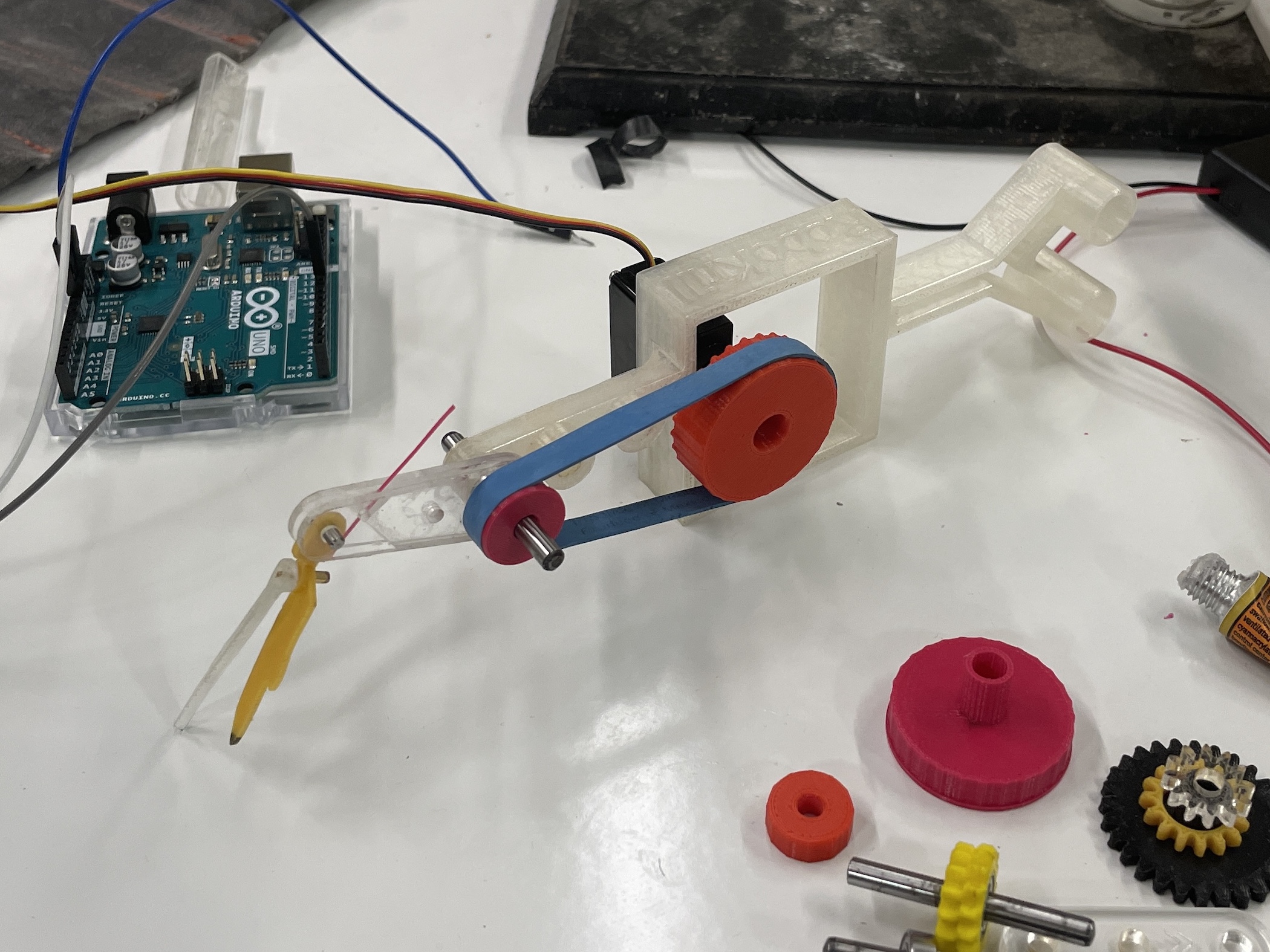
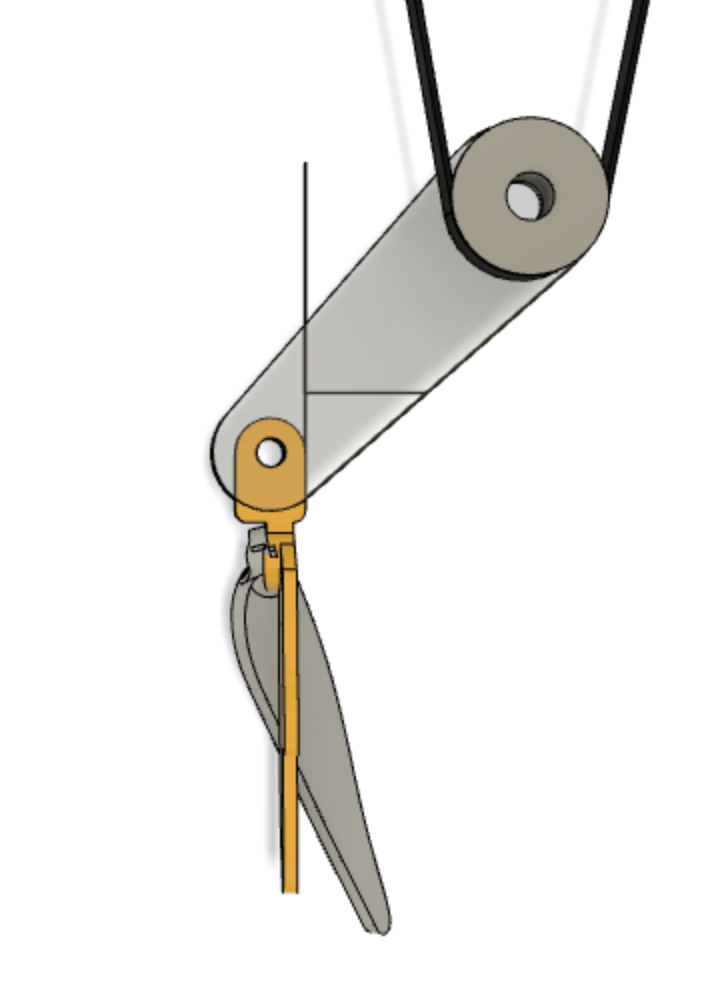
Passively-actuated leg for krill-inspired robot. Uses PLA “spring” to mimic krill leg trajectory. Completed as a part of a group project for ENGN1735: Vibrations of Mechanical Systems.