Bat-inspired flapping-wing robot
3D-printed resin parts, metal hardware, pink foam, stepper motors
July 2021, Breuer Lab, Brown University


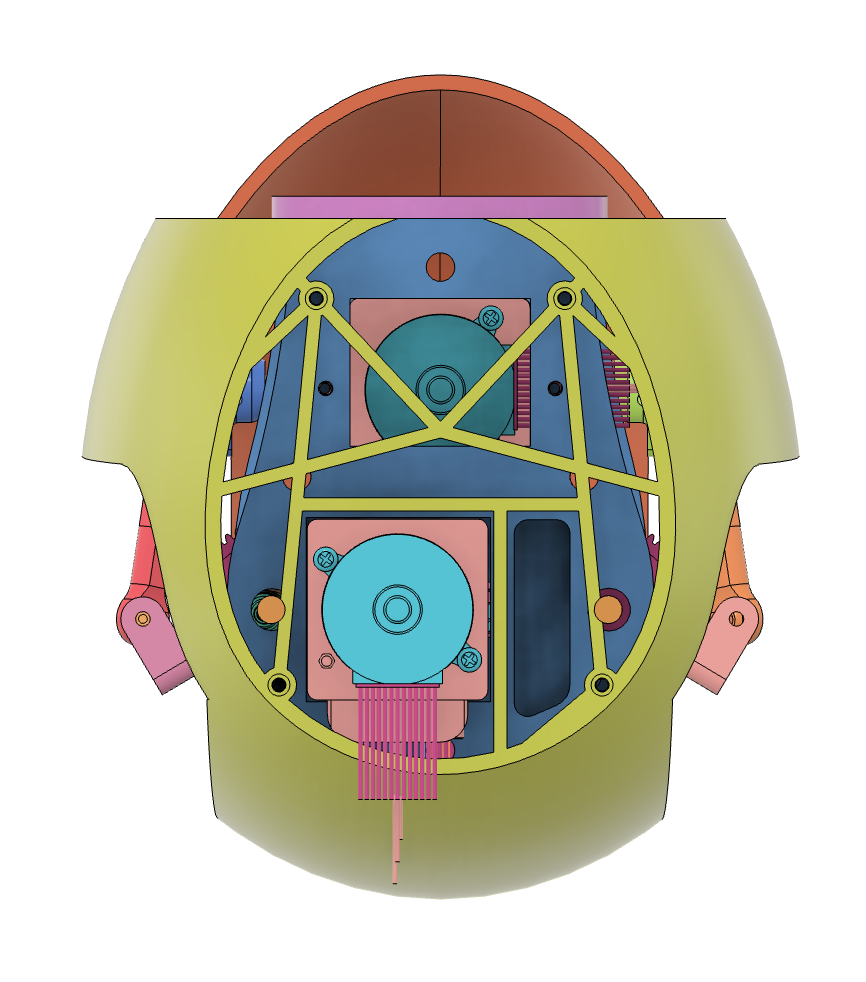
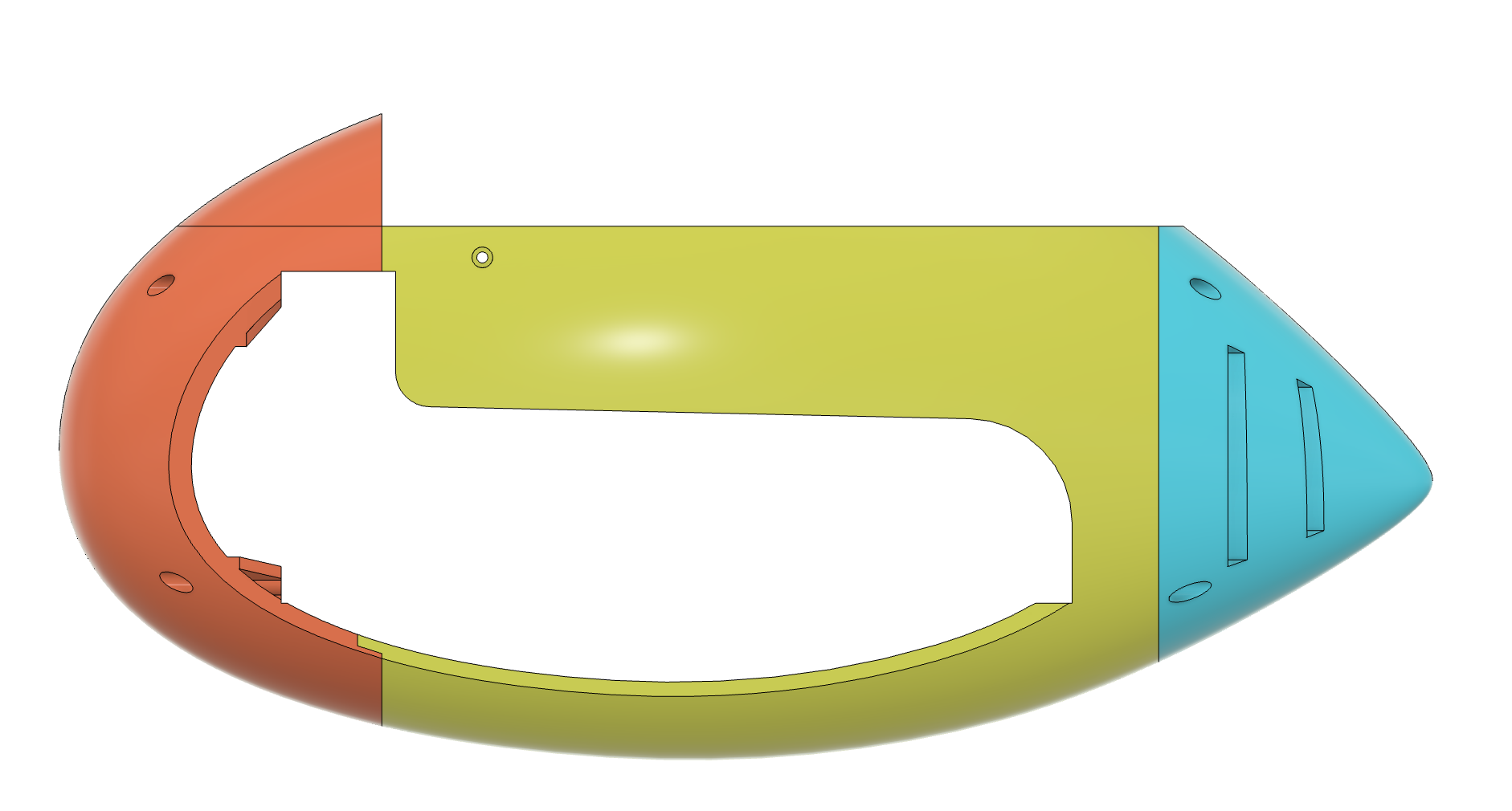

Bat-inspired flapping-wing robot I helped to design, build, and test in Breuer Lab over the course of three years.